
I designed an embedded system that leverages an 8-bit microcontroller (PIC16F873A-I/SO) and sensors to interact with its surrounding environment. The algorithm was developed in C instructing the robot to navigate through a course by following a black line, while concurrently detecting changes in temperature and magnetic field.
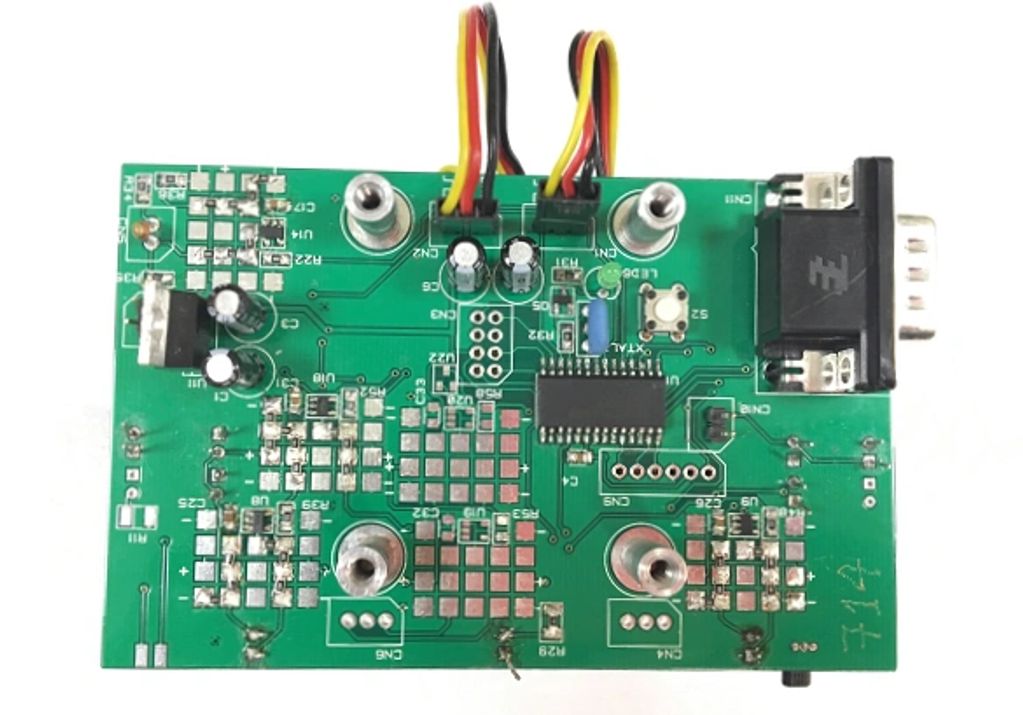
All sensors on the robot were custom designed with SMT components and implemented as follows:
- Light Tracking Sensor - using infared LEDS and photodiodes
- Temperature Sensor - using a thermistor
- Magnet Detecting Sensor - using hall effect sensor
- Current Sensor - to assess battery power
- Encoders - using infared LEDS, phototransistors, and encoder plate