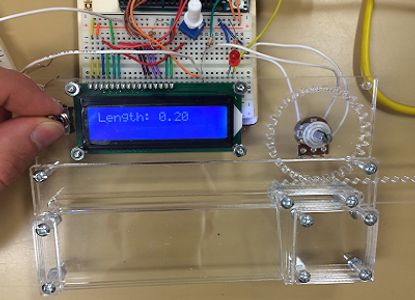
I developed a caliper with 3 classmates that has the ability to measure lengths between 0 mm to 120 mm with a calculated maximum uncertainty of 11 mm. The caliper uses a rack and pinion to convert linear displacement into rotary motion, a potentiometer to convert the angular displacement of a gear into units of voltage, and a LCD to display the measurements to the user.
I designed the rack and pinion in AutoCAD to have an appropriate mesh when actuated. I laser cut the rack and pinion from a sheet of 5 mm thick transparent plastic.