End-Effector Wrist Design
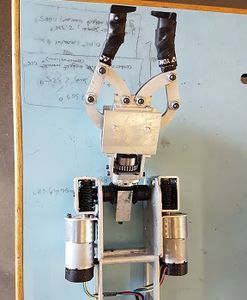
As a dedicated member of the University of Waterloo’s Mars Rover Team, I designed a mechanical system used as the wrist of a rover we designed to compete in the 2017 University Rover Challenge. The wrist is comprised of a 3 bevel gear system that allows the end-effector to rotate with 2 rotational degrees of freedom.
The entire system was modelled as a Solidworks assembly. Once validated, the system was machined and implemented into the rover.
